Hybrid Robot - Organic Combination of Cartesian Coordinate Robot and Joint Robot
2021-06-17 16:03:01
Abstract: Cartesian robots are widely used in various automated production lines for palletizing, loading and unloading, feeding, assembly, inspection, welding and gluing. It is praised by various industry experts and operators for its advantages of large travel, strong load capacity, high precision, easy combination, high cost performance, easy programming, and easy maintenance. However, it is not flexible for joint robots when completing some tasks that need to enter a small space. If we can combine part of the functions and characteristics of the Cartesian coordinate robot and the articulated robot, we can maintain the advantages of the Cartesian coordinate robot while expanding its application areas and application flexibility. For this reason, some companies and scientists continue to work hard to achieve this combination. Among them, hybrid robots based on DMT are the most typical ones, and they are briefly introduced below.
First, the composition of the hybrid robot As shown in Figure 1, the six-degree-of-freedom hybrid robot consists of three linear motion axes, two rotation axes and one swing axis. The three linear motion axes of the six-degree-of-freedom hybrid robot in FIG. 1 are cantilever-type Cartesian robots. A rotation axis is driven at the lower end of the Z-axis moving up and down, and the rotation axis drives a swing axis, and the swing axis end brings a rotation axis. The end of the rotation axis drives the claws. Since the two rotary axes and the pivot axis are actually the three motion axes at the end of the joint robot, the six-axis hybrid robot is a combination of a three-axis rectangular coordinate robot and three most-end motion axes of an articulated robot. According to actual needs, the linear motion axis of the hybrid robot may also be a two-dimensional XY-axis structure or an XZ-axis structure, or a gantry structure. The travel and load carrying capacity of each linear motion axis can be done as required.
Second, the characteristics of hybrid robots 1. The workspace has the advantages of large travel and large span of Cartesian coordinate robots. For example, after the assembly, the X axis can reach 100m, and the Y axis can reach 20m; in short, the large robots that can be combined into the required working space can be assembled as required.
2. The linear motion axis of the combined-type hybrid robot may also be a two-dimensional XY-axis structure or an XZ-axis structure, or a gantry structure. According to the stroke and bearing capacity of each linear motion axis, multiple combinations can be used to ensure that each axis is not deformed and has sufficient strength. The last three rotary axes can also be selected as two rotary axes. In short, the hybrid robot can be completely designed into the structure and work schedule.
3, load capacity rectangular coordinates of the gantry frame structure, bearing capacity, unlimited expansion, stable and reliable, relatively low cost. The ability to grasp objects is primarily limited by the three end rotating axes. At present, the weight of objects that can be grasped with the claws is: 25 kg, 50 kg and 100 kg.
4. Work Accuracy Usually, the repetitive positioning accuracy of a single linear motion axis is 0.05mm, while the screw driven type and precision gear rack-driven type can reach 0.01mm or even higher. It is also possible to add position feedback signals, such as magnetic beads, to improve positioning accuracy. The final comprehensive accuracy depends on the three rotation axes at the end.
5. The simple hybrid robot with modular configuration is a modular structure. It is all pre-connected and operated at the assembly plant, and then it is dismantled and shipped from the factory. The site is simply assembled by bolts, and the level can be adjusted electrically. Users can even complete the mechanical installation by themselves. The gantry frame is the entire installation space and its working space is also within the framework. There is no need for very professional staff adjustments, simple installations, adjustments, and later service fees are low.
6. The low maintenance cost in the later period does not require very professional staff adjustments, simple installation, low adjustment and late maintenance costs. The programming and manipulation of the joint robot must be completed by the supplier through professional training (the manufacturer software programming cost is 300 yuan/hour), and the special software needs to be charged.
7, cost-effective: regardless of the first purchase, or post-service costs are much lower than the articulated robot.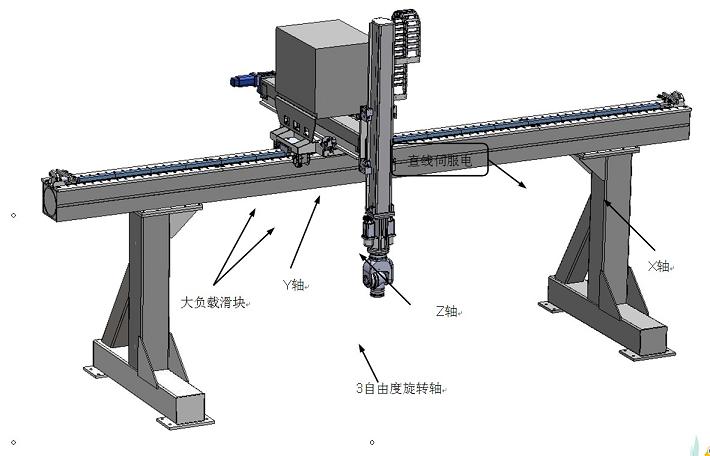
Figure 1 is a typical 3D Cartesian robot consisting of an X-axis, a Y-axis, a Z-axis, and a drive motor. In addition a complete robot system also requires control systems and hands.
Third, part of the application of the hybrid robot 1, in addition to the completion of the traditional Cartesian coordinate robot tasks, it is more suitable for the plus and stand plus plus material. Its structure makes it easier for the grippers to reach into the workbench inside the machine's protective cover.
2. If the workpiece is picked up and fed to multiple machines, the parts need to be rotated horizontally or even turned upside down to complete the loading and unloading of each device. The hybrid robot is very suitable. There are many such applications, such as a robot feeding and lathes and quenching equipment at the same time.
3, whether it is cold stamping, or hot stamping sometimes need to extend the steel plate into the middle of the upper and lower mold, then the hybrid robot is very suitable. In addition, when the protective doors of some vertical machining centers are fully open, the parts cannot be lowered from the top, and they must extend from the front to the inside.
IV. Conclusion In conclusion, it is necessary to extend the parts from the side to the top of the table, or to rotate or flip the parts from one piece of equipment to one piece of equipment. This type of heavy load handling and loading and unloading applications are very complex. suitable.
First, the composition of the hybrid robot As shown in Figure 1, the six-degree-of-freedom hybrid robot consists of three linear motion axes, two rotation axes and one swing axis. The three linear motion axes of the six-degree-of-freedom hybrid robot in FIG. 1 are cantilever-type Cartesian robots. A rotation axis is driven at the lower end of the Z-axis moving up and down, and the rotation axis drives a swing axis, and the swing axis end brings a rotation axis. The end of the rotation axis drives the claws. Since the two rotary axes and the pivot axis are actually the three motion axes at the end of the joint robot, the six-axis hybrid robot is a combination of a three-axis rectangular coordinate robot and three most-end motion axes of an articulated robot. According to actual needs, the linear motion axis of the hybrid robot may also be a two-dimensional XY-axis structure or an XZ-axis structure, or a gantry structure. The travel and load carrying capacity of each linear motion axis can be done as required.
Second, the characteristics of hybrid robots 1. The workspace has the advantages of large travel and large span of Cartesian coordinate robots. For example, after the assembly, the X axis can reach 100m, and the Y axis can reach 20m; in short, the large robots that can be combined into the required working space can be assembled as required.
2. The linear motion axis of the combined-type hybrid robot may also be a two-dimensional XY-axis structure or an XZ-axis structure, or a gantry structure. According to the stroke and bearing capacity of each linear motion axis, multiple combinations can be used to ensure that each axis is not deformed and has sufficient strength. The last three rotary axes can also be selected as two rotary axes. In short, the hybrid robot can be completely designed into the structure and work schedule.
3, load capacity rectangular coordinates of the gantry frame structure, bearing capacity, unlimited expansion, stable and reliable, relatively low cost. The ability to grasp objects is primarily limited by the three end rotating axes. At present, the weight of objects that can be grasped with the claws is: 25 kg, 50 kg and 100 kg.
4. Work Accuracy Usually, the repetitive positioning accuracy of a single linear motion axis is 0.05mm, while the screw driven type and precision gear rack-driven type can reach 0.01mm or even higher. It is also possible to add position feedback signals, such as magnetic beads, to improve positioning accuracy. The final comprehensive accuracy depends on the three rotation axes at the end.
5. The simple hybrid robot with modular configuration is a modular structure. It is all pre-connected and operated at the assembly plant, and then it is dismantled and shipped from the factory. The site is simply assembled by bolts, and the level can be adjusted electrically. Users can even complete the mechanical installation by themselves. The gantry frame is the entire installation space and its working space is also within the framework. There is no need for very professional staff adjustments, simple installations, adjustments, and later service fees are low.
6. The low maintenance cost in the later period does not require very professional staff adjustments, simple installation, low adjustment and late maintenance costs. The programming and manipulation of the joint robot must be completed by the supplier through professional training (the manufacturer software programming cost is 300 yuan/hour), and the special software needs to be charged.
7, cost-effective: regardless of the first purchase, or post-service costs are much lower than the articulated robot.
Figure 1 is a typical 3D Cartesian robot consisting of an X-axis, a Y-axis, a Z-axis, and a drive motor. In addition a complete robot system also requires control systems and hands.
Third, part of the application of the hybrid robot 1, in addition to the completion of the traditional Cartesian coordinate robot tasks, it is more suitable for the plus and stand plus plus material. Its structure makes it easier for the grippers to reach into the workbench inside the machine's protective cover.
2. If the workpiece is picked up and fed to multiple machines, the parts need to be rotated horizontally or even turned upside down to complete the loading and unloading of each device. The hybrid robot is very suitable. There are many such applications, such as a robot feeding and lathes and quenching equipment at the same time.
3, whether it is cold stamping, or hot stamping sometimes need to extend the steel plate into the middle of the upper and lower mold, then the hybrid robot is very suitable. In addition, when the protective doors of some vertical machining centers are fully open, the parts cannot be lowered from the top, and they must extend from the front to the inside.
IV. Conclusion In conclusion, it is necessary to extend the parts from the side to the top of the table, or to rotate or flip the parts from one piece of equipment to one piece of equipment. This type of heavy load handling and loading and unloading applications are very complex. suitable.
Our Telecommunication Tower are made from quality sheet through bending, forming, automatic welding and hot galvanization. We can reach one-run machining length of 14m and can bend sheet of thickness up to 45mm. We adopt advanced welding procedures, automatically weld main joints and reach rank-II welding quality.
Telecommunication Tower, Telecommunication Steel Tower, Telecom Steel Tower, Telecom Steel Mono Tower
Jiangsu Xinjinlei Steel Industry Co., Ltd. , https://www.steel-pole.com